POST TIME:2021-07-22 17:05
在了解了许多双足机器人的下肢结构之后,我注意到了敏捷机器人公司的ATRIAS机器人,它的腿在一条直线上,比串联起来更简单。同时,在分析了成熟的DELTA折叠式机械手工作原理的基础上,提出了DELTA折叠式结构可以应用于双足机器人的下肢。
Delta机器人具有特殊的正交凹入结构,即从三角形排列到垂直排列的三组对话机构,以便更好地容纳两套由双腿结构组成的DELTA,同时每组可以加厚2组腿部,以更好地完成步行动作。
RUU结构有一个驱动杆、主动杆、上壳体铰链、从动杆、下壳体铰链,从上到下连接在脚球上。六个方向舵是由六个大部件组成的,六个驱动部件和六个大扭矩舵安装在顶部基座上,以形成完整的结构。
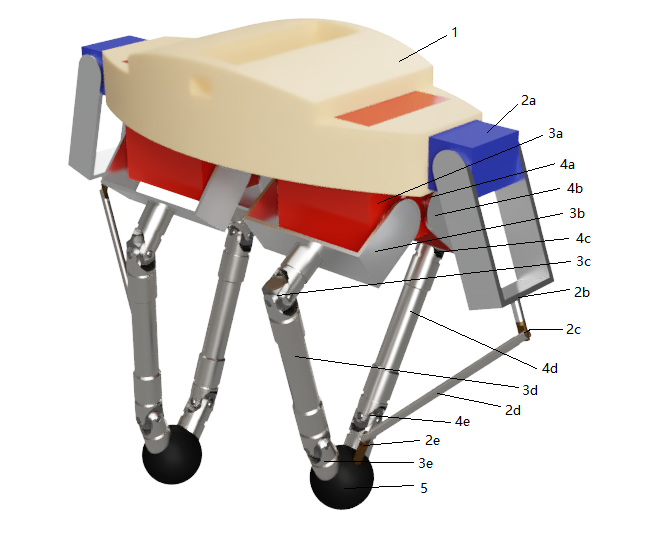
1-基础部分,2a 3a 4a-驱动装置(大扭矩舵),2b 3b 4b-主动杆(舵架)
2c 3c 4c-绿巨人铰链(Wan-Hinge节),2d 3d 4d-环杆
2e 3e 4e *-绿巨人(Wan-Hinge节),5-足球 *-大块固定在一个角度
为了方便生产,双足机器人底座采用3D打印,驱动市售60kg和18kg大扭矩系列舵机,Hulk铰链采用可购买的10mm和4mm杆杆进行改装,腿部骨架采用中空钛合金管制成,以减少主动部分的惯性,脚球由高弹性聚氨酯橡胶球制成。
控制板是Curie Nano,基于英特尔居里模块设计并与Arduino 101兼容。该模块包括一个x86 quark内核……
责任编辑:xj
原文标题:3D打印一个带Delta的双足机器人
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。

上一篇:如何制作电话灯及其原理
下一篇:特种机器人和工业机器人的区别
|
|
|
|||||||||||||||
| 全国咨询热线 | |||||||||||||||||
| 400-1100-266 | |||||||||||||||||
| 在线客服( QQ:340506921 ) | |||||||||||||||||



