随着docker的出现,很多服务已经慢慢脱离了对硬件架构的依赖,很多arm结构的硬件也能运行x86的服务,docker启动速度和部署的快速性也受到广大极客的青睐,之前我是在自己买的树莓派4B安装了一个kali,我们都知道树莓派是arm架构CPU。我准备在上面部署一个nextcloud所以就想到了docker。
好了,不废话上命令:
1.安装docker和启动docker
sudo apt-get install docker sudo systemctl start docker
2.docker源加速(配置国内源)
sudo mkdir -p /etc/docker
sudo vi /etc/docker/daemon.json
{
"registry-mirrors": ["http://hub-mirror.c.163.com"]
}
3.安装portainer图形管理界面
因为docker都是命令启动,管理比较麻烦,所以我们安装一个portainer容器来进行图形化管理
sudo docker pull portainer/portainer sudo docker run -d -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock --restart=always --name prtainer portainer/portainer
这里我们是把docker的9000端口直接映射到外部9000端口然后我们通过127.0.0.1:9000可以访问
第一次访问是需要配置admin管理员密码的
配置完成后登陆:
这里我们选择本地就行,也可以支持远程的我们这里以本地为例:



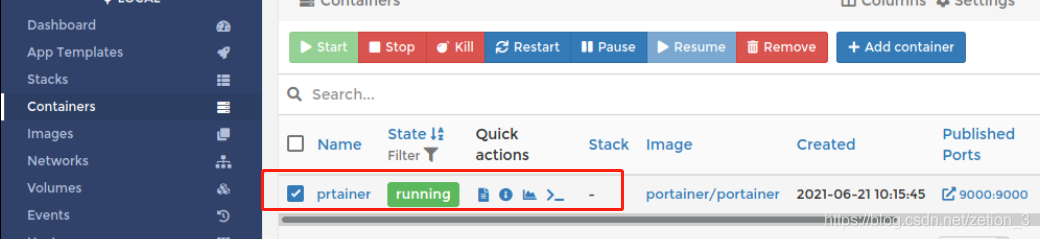
然后我们这里就出现本地的docker所有的镜像了在上面可以进行管理
4.常用的一些portainer对docker容器进行操作配置都在这里Duplicate/Edit
点击要配置的容器

点击Duplicate/Edit

这边就是容器的一些配置选项
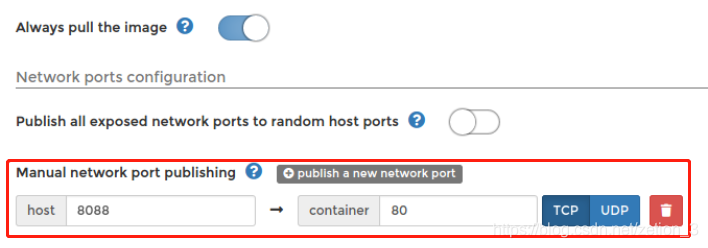
这里修改映射端口:
这里可以修改时区:


Volumes这个就是将容器内的目录挂载到本地,本地这里也可以挂载到本地volume如果是目录就要点击Bind

这个就是我们上面命令的--restart=always启动容器后自己启动

其他自己发现,另外也能通过Portainer重启容器了。
也可以下载容器:

以上就是kali安装docker和portainer的详细内容,更多关于kali安装docker的资料请关注脚本之家其它相关文章!