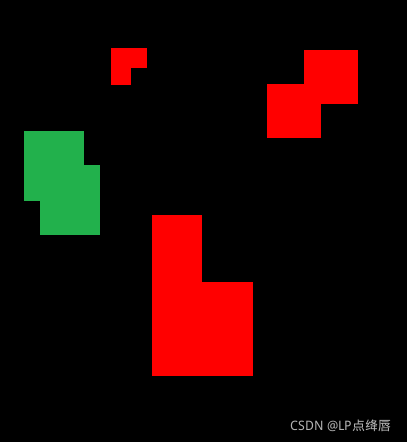
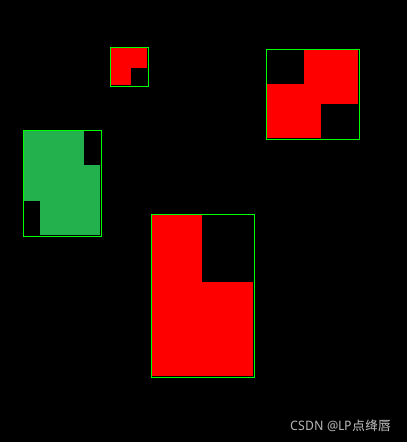
画外接矩形框,可以画成一个最大的,也可以分别画。
# -*- coding: utf-8 -*-
import cv2
image = cv2.imread('G:/110w2/mask_tif4/00.png')
print(image.shape)
print(image.shape[0]) # h
print(image.shape[1]) # w
# 图像转灰度图
img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#cv2.imwrite('G:/110w2/mask_tif4/02.png', img)
# 图像转二值图
ret, thresh = cv2.threshold(img, 2, 255, cv2.THRESH_BINARY_INV)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
x1 = []
y1 = []
x2 = []
y2 = []
for c in contours:
# 找到边界坐标
x, y, w, h = cv2.boundingRect(c) # 计算点集最外面的矩形边界
print(x, y, w, h)
# 因为这里面包含了,图像本身那个最大的框,所以用了if,来剔除那个图像本身的值。
if x != 0 and y != 0 and w != image.shape[1] and h != image.shape[0]:
# 左上角坐标和右下角坐标
# 如果执行里面的这个画框,就是分别来画的,
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 1)
x1.append(x)
y1.append(y)
x2.append(x + w)
y2.append(y + h)
x11 = min(x1)
y11 = min(y1)
x22 = max(x2)
y22 = max(y2)
# 这个是画出所有目标,都可以包含在内的,一个外接矩形框。
#cv2.rectangle(image, (x11, y11), (x22, y22), (0, 0, 255), 1)
#cv2.imshow("img", image)
cv2.imwrite('G:/110w2/mask_tif4/0_001.png', image)
cv2.waitKey(0)
# 功能:cv2.findContours()函数来查找检测物体的轮廓。
#参数:
# 参数1:寻找轮廓的图像,接收的参数为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图
# 参数2: 轮廓的检索模式,有四种。
# cv2.RETR_EXTERNAL 表示只检测外轮廓;
# cv2.RETR_LIST 检测的轮廓不建立等级关系;
# cv2.RETR_CCOMP 建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
# cv2.RETR_TREE 建立一个等级树结构的轮廓。
#
# 参数3: 轮廓的近似办法.
# cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
# cv2.CHAIN_APPROX_SIMPLE 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
# cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS 使用teh-Chinl chain 近似算法
# 注:opencv2返回两个值:contours:hierarchy。opencv3会返回三个值,分别是img, countours, hierarchy
#
#返回值
#cv2.findContours()函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。
到此这篇关于python opencv 画外接矩形框的完整代码的文章就介绍到这了,更多相关python opencv矩形框内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
标签:三亚 葫芦岛 银川 安庆 乌鲁木齐 呼伦贝尔 湘西 呼伦贝尔
巨人网络通讯声明:本文标题《python opencv 画外接矩形框的完整代码》,本文关键词 python,opencv,画,外接,矩形,;如发现本文内容存在版权问题,烦请提供相关信息告之我们,我们将及时沟通与处理。本站内容系统采集于网络,涉及言论、版权与本站无关。