在大多数语音识别任务中,我们都缺少文本和音频特征的alignment,Connectionist Temporal Classification作为一个损失函数,用于在序列数据上进行监督式学习,可以不需要对齐输入数据及标签。
对于输入序列 X = [ x 1 , x 2 , . . , x T ] X=[x_1, x_2, .., x_T] X=[x1,x2,..,xT] 和 输出序列 Y = [ y 1 , y 2 , . . . , y U ] Y = [y_1, y_2, ..., y_U ] Y=[y1,y2,...,yU],我们希望训练一个模型使条件概率 P ( Y ∣ X ) P(Y|X) P(Y∣X) 达到最大化,并且给定新的输入序列时我们希望模型可以推测出最优的输出序列, Y ∗ = a r g m a x Y P ( Y ∣ X ) Y^*=\underset{Y}{argmax}\space P(Y|X) Y∗=Yargmax P(Y∣X),而CTC算法刚好可以同时做到训练和解码。
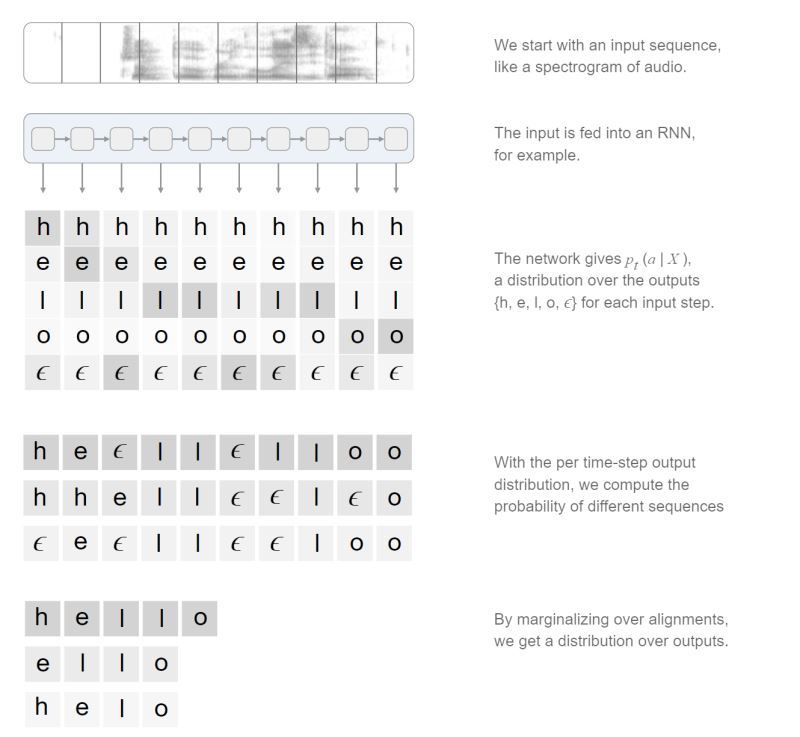
语音识别任务中,大多数情况下都是输入序列长度大于文本序列长度,所以CTC算法的alignment方案也是基于将连续的几帧输入合并对应到某一个输出的token,即多对一,同时除了训练数据中所有的token集合,CTC还引入了一个空白token,在这里用 ϵ \epsilon ϵ 指代,他没有实际意义并且在最终输出序列中被移除,但这个token对生成alignment很有帮助。
CTC算法生成最终token输出序列步骤如下:
生成和输入序列长度相同的alignment → 合并相同token → 删除空白token → token序列
上面步骤准确来讲是解码的步骤,解码之前我们要训练模型,训练模型就需要损失函数,或者说需要一个被优化的目标函数:

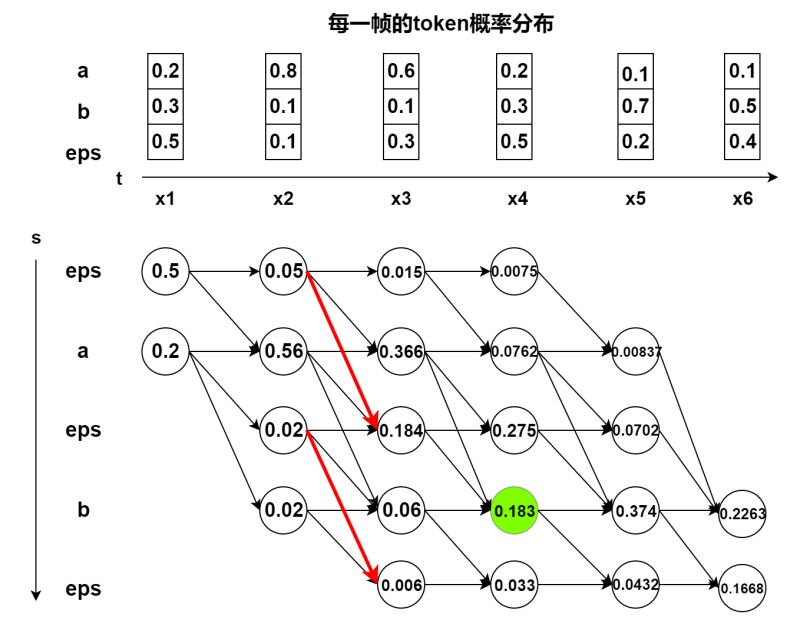
以下图的普通RNN为例, p t ( a t ∣ X ) p_t(a_t|X) pt(at∣X) 是每一帧在token集合(含空白token)上的概率分布
通过每一帧的概率分布我们可以得到所有(有效)alignment的概率,最后所有alignment都可以对应到一个输出序列,进而也就得到所有输出序列的概率分布。我们找到所有能够合并到 label (Y)序列的 alignment,并将他们的概率分数相加,再取负对数就可以得到一对训练数据的Loss。
那么对于整个数据集,可以得到目标函数 ∑ ( X , Y ) ∈ 训 练 数 据 集 − l o g P ( Y ∣ X ) \sum_{(X,Y)\in 训练数据集}-log\space P(Y|X) ∑(X,Y)∈训练数据集−log P(Y∣X),训练中需要将其最小化。
用暴力的方法找出所有alignment并对其概率求和效率很低,常用的算法是通过动态规划对alignment进行合并,准确来讲是一个动态规划+DFS的算法:
为了实现这个算法,先引入一个中间序列 Z = ( ϵ , y 1 , ϵ , y 2 . . . , ϵ , y U ) Z=(\epsilon,y_1,\epsilon,y_2...,\epsilon,y_U) Z=(ϵ,y1,ϵ,y2...,ϵ,yU),也就是在label序列的起始,中间和终止位置插入空白token,引入这个中间序列可以说是CTC算法的精髓之一,下面我们以简单的 Y = ( a , b ) Y=(a,b) Y=(a,b) 输出序列进行说明:
中间序列 Z = ( ϵ , a , ϵ , b , ϵ ) Z=(\epsilon,a,\epsilon,b,\epsilon) Z=(ϵ,a,ϵ,b,ϵ),长度为 S S S
输入序列 X = ( x 1 , x 2 , x 3 , x 4 , x 5 , x 6 ) X=(x_1, x_2, x_3, x_4,x_5,x_6) X=(x1,x2,x3,x4,x5,x6),长度为 T T T
递归参数 α s , t \alpha_{s,t} αs,t 到 t t t 时刻为止中间序列的子序列 Z 1 : s Z_{1:s} Z1:s获得的概率分数,也就是在 t t t时刻走到中间序列第 s s s个token时的概率分数
算法整体流程如下图所示,和原文中的图比起来加入了具体数值,理解起来更加直观,图中的红色路径表示不能进行跳转,因为如果直接从 t = 2 t=2 t=2 的第一个 ϵ \epsilon ϵ 跳到 t = 3 t=3 t=3 时刻的第3个 ϵ \epsilon ϵ,中间的token a a a 会被忽略,这样后面的路径不管怎么走都得不到正确的token序列。
其他情况下都可以接受来自上一个时刻的第 s − 2 , s − 1 , s s-2,s-1,s s−2,s−1,s个token的跳转,再对图中的节点做进一步解释,以绿色节点为例,该节点就是 α 4 , 4 \alpha_{4,4} α4,4 (下标从1开始),表示前面不管怎么走,在 t = 4 t=4 t=4时刻落到第4个token时获得的概率分数,也就是把这个时刻能走到 b b b 的所有alignment 概率分数加起来。那么把最后一帧的2个节点的概率分数相加就是所有alignment的概率分数,即 P ( Y ∣ X ) = α S , T + α S − 1 , T P(Y|X)=\alpha_{S,T}+\alpha_{S-1, T} P(Y∣X)=αS,T+αS−1,T
下面直接给出dp的状态转换公式, p t ( z s ∣ X ) p_t(z_s|X) pt(zs∣X) 表示 t t t 时刻第 s s s 个字符的概率:
α s , t = ( α s , t − 1 + α s − 1 , t − 1 ) × p t ( z s ∣ X ) \alpha_{s,t}=(\alpha_{s,t-1}+\alpha_{s-1, t-1})\times p_t(z_s|X) αs,t=(αs,t−1+αs−1,t−1)×pt(zs∣X), ( a , ϵ , a ) (a,\epsilon, a) (a,ϵ,a)或者 ( ϵ , a , ϵ ) (\epsilon,a,\epsilon) (ϵ,a,ϵ) 模式
α s , t = ( α s − 2 , t − 1 + α s − 1 , t − 1 + α s , t − 1 ) × p t ( z s ∣ X ) \alpha_{s,t}=(\alpha_{s-2,t-1}+\alpha_{s-1,t-1}+\alpha_{s,t-1})\times p_t(z_s|X) αs,t=(αs−2,t−1+αs−1,t−1+αs,t−1)×pt(zs∣X),其他情况
解码问题就是已经有训练好的模型,需要通过输入序列推测出最优的token序列,实际上就是解决 Y ∗ = a r g m a x Y P ( Y ∣ X ) Y^*=\underset{Y}{argmax}\space P(Y|X) Y∗=Yargmax P(Y∣X) 这个问题,那么能想到最直接的方法就是取每一帧概率分数最高的token,连接起来去掉 ϵ \epsilon ϵ 组成输出序列,也就是贪婪解码:
这样做虽然很高效但有时并不是最优解,比如几个概率分数较小的alignment序列最后都能转换为相同的token序列,那么将这些较小的alignment概率分数加起来可能会大于贪婪解码的概率分数。
常用的算法是改进版的beam search,常规的beam search是在每一帧都会保存概率分数最大的前几个路径并舍弃其他的,最后会给出最优的 b e a m beam beam 个路径,在此基础上,我们在路径搜索的过程中,需要对能映射到相同输出的alignment进行合并,合并之后再进行beam的枝剪。
CTC最明显的特点就是前后帧之间的条件独立假设
缺点:不适合包括语音识别在内的大多数seq2seq任务,上下文之间的相关性会被忽略,因此经常需要额外引入语言模型。
优点:不考虑上下文的相关性可以使模型泛化能力更强,比如如果不考虑文本之间的相关性,用于识别日常会话的声学模型可以直接用在会议内容转录的场景中。
由于语言模型分数和CTC的条件概率分数相互独立,因此最终的解码序列可以写成
Y ∗ = a r g m a x Y P ( Y ∣ X ) × P ( Y ) α Y^*=\underset{Y}{argmax} \space P(Y|X)\times P(Y)^\alpha Y∗=Yargmax P(Y∣X)×P(Y)α, P ( Y ) P(Y) P(Y)表示语言模型的概率分数,可以是bigram也可以是3gram,以bigram为例的话,如果当前时刻序列是 ( a , b , c ) (a,b,c) (a,b,c),计算下一帧跳到 d d d 的概率分数时,不仅要考虑下一时刻的token概率分布,还要考虑训练文本中 ( c , d ) (c,d) (c,d) 出现的频次,即 c o u n t ( c , d ) / c o u n t ( c , ∗ ) count(c,d) / count(c,*) count(c,d)/count(c,∗),将这个概率和 d d d出现的概率相乘才是最终的概率分数, α \alpha α 是语言模型因子,需要fine tuning。
代码实现
损失函数(动态规划+DFS)
常规beam search解码
合并alignment的beam search解码
加入语言模型的 beam search解码
到此这篇关于python实现CTC以及案例讲解的文章就介绍到这了,更多相关python实现CTC内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!