概述
Visdom:一个灵活的可视化工具,可用来对于 实时,富数据的 创建,组织和共享。支持Torch和Numpy还有pytorch。
visdom
可以实现远程数据的可视化,对科学实验有很大帮助。我们可以远程的发送图片和数据,并进行在ui界面显示出来,检查实验结果,或者debug.
要用这个先要安装,对于python模块而言,安装都是蛮简单的:
安装完每次要用直接输入代码打开:
然后根据提示在浏览器中输入相应地址即可,默认地址为:http://localhost:8097/
使用示例
1. vis.text(), vis.image()
import visdom # 添加visdom库
import numpy as np # 添加numpy库
vis = visdom.Visdom(env='test') # 设置环境窗口的名称,如果不设置名称就默认为main
vis.text('test', win='main') # 使用文本输出
vis.image(np.ones((3, 100, 100))) # 绘制一幅尺寸为3 * 100 * 100的图片,图片的像素值全部为1
其中:
visdom.Visdom(env=‘命名新环境')
vis.text(‘文本', win=‘环境名')
vis.image(‘图片',win=‘环境名')
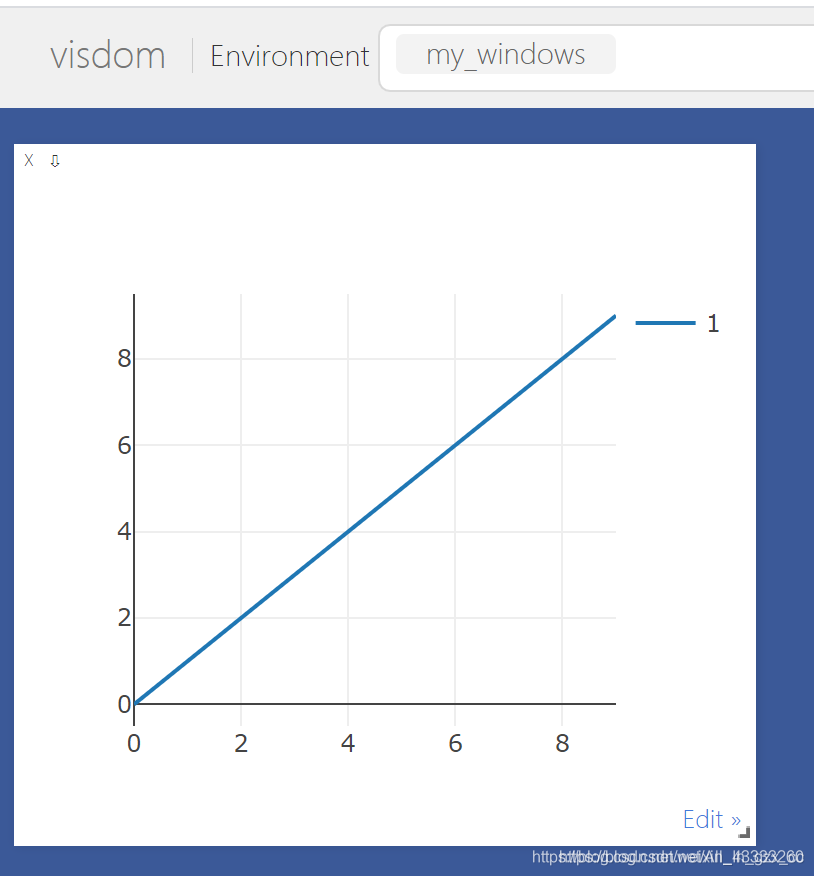
2. 画直线 .line() 一条
import visdom
import numpy as np
vis = visdom.Visdom(env='my_windows') # 设置环境窗口的名称,如果不设置名称就默认为main
x = list(range(10))
y = list(range(10))
# 使用line函数绘制直线 并选择显示坐标轴
vis.line(X=np.array(x), Y=np.array(y), opts=dict(showlegend=True))
vis.line([x], [y], opts=dict(showlegend=True)[展示说明])
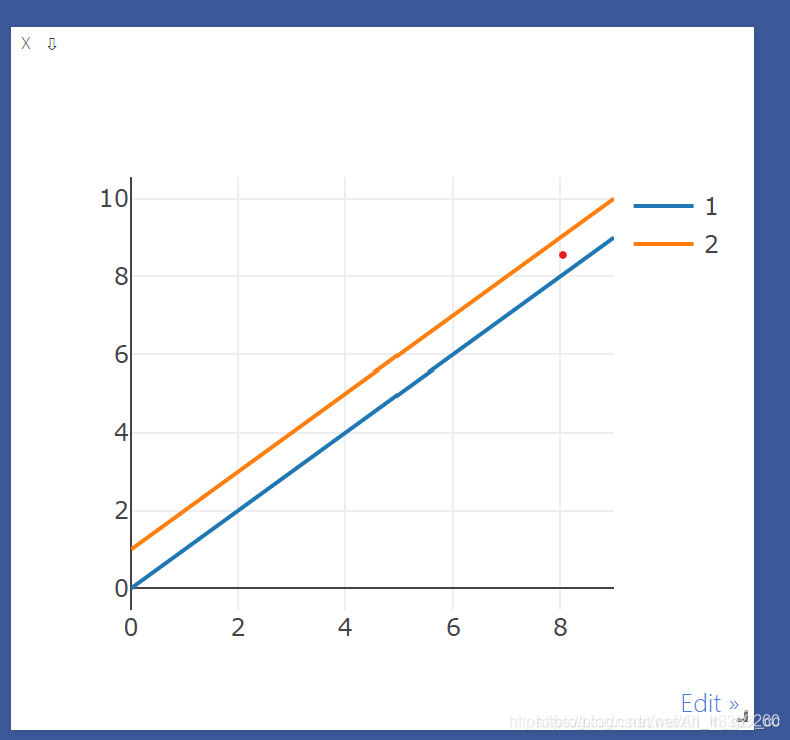
两条
import visdom
import numpy as np
vis = visdom.Visdom(env='my_windows')
x = list(range(10))
y = list(range(10))
z = list(range(1,11))
vis.line(X=np.array(x), Y=np.column_stack((np.array(y), np.array(z))), opts=dict(showlegend=True))
vis.line([x], [y=np.column_stack((np.array(y),np.array(z),np.array(还可以增加)))])
np.column_stack(a,b), 表示两个矩阵按列合并
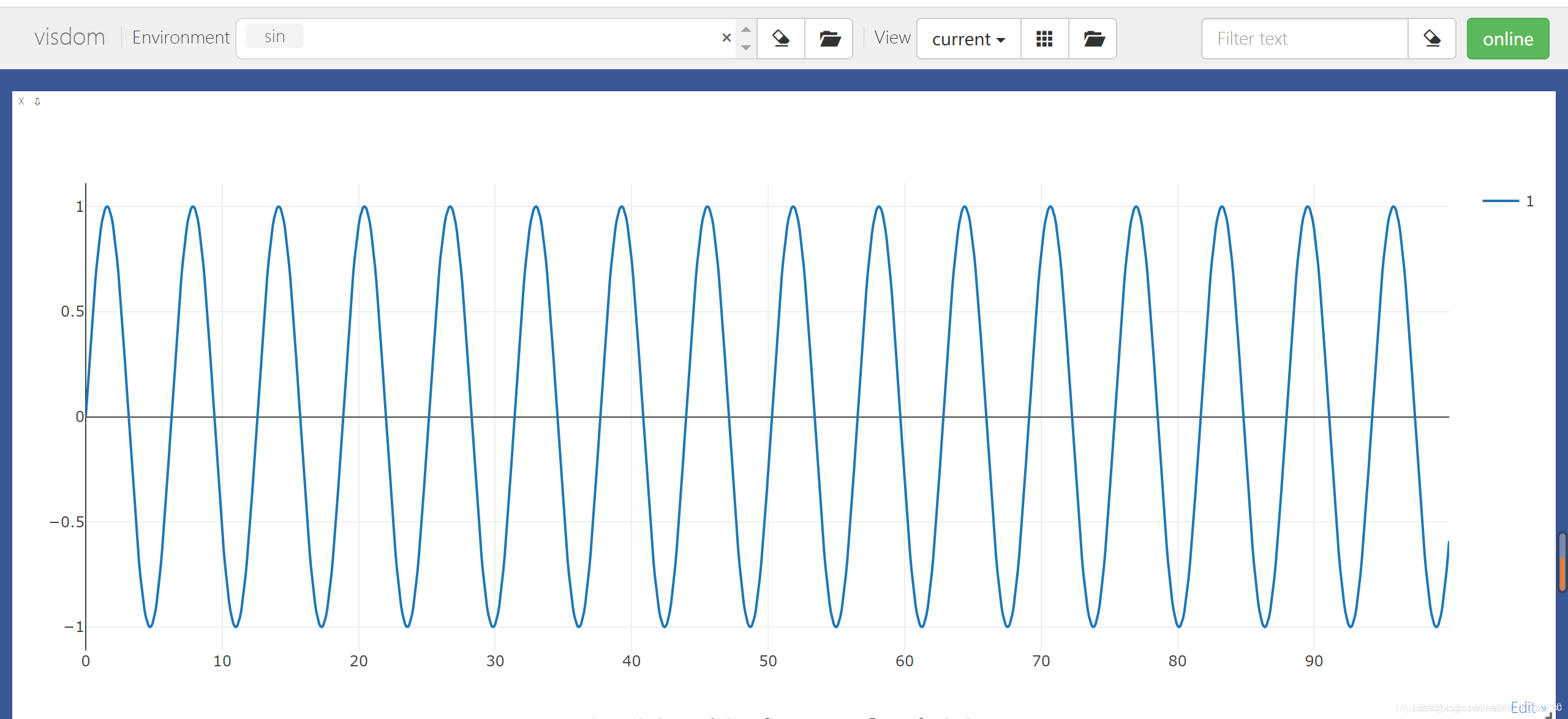
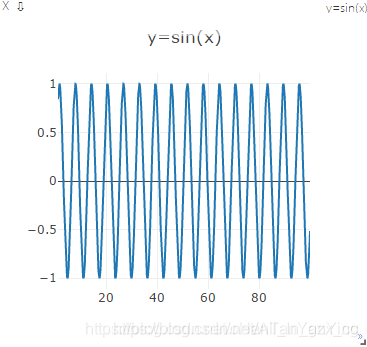
sin(x)曲线
import visdom
import torch
vis = visdom.Visdom(env='sin')
x = torch.arange(0, 100, 0.1)
y = torch.sin(x)
vis.line(X=x,Y=y,win='sin(x)',opts=dict(showlegend=True))
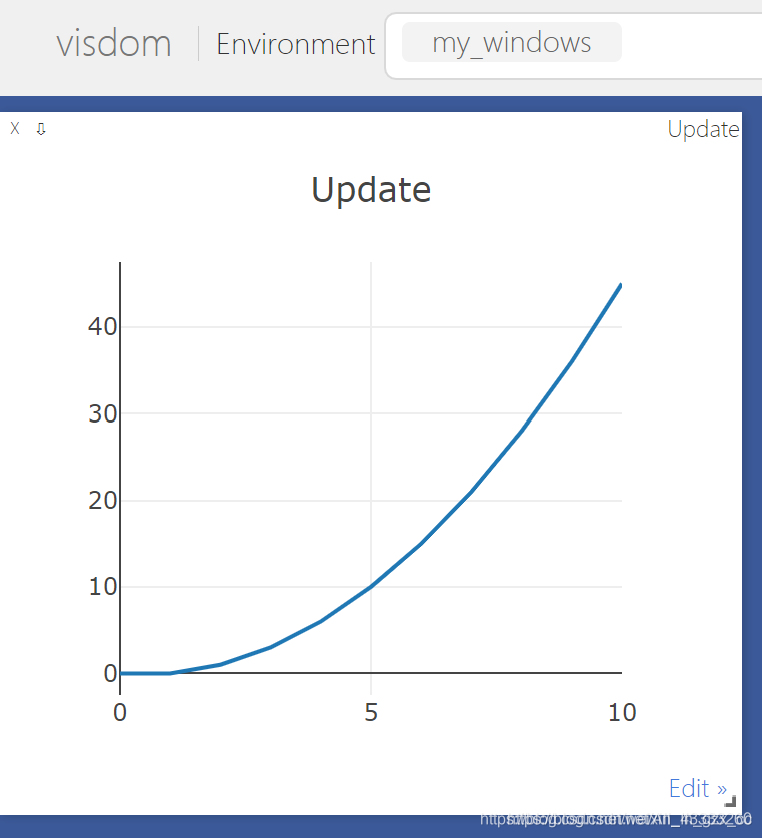
持续更新图表
import visdom
import numpy as np
vis = visdom.Visdom(env='my_windows')
# 利用update更新图像
x = 0
y = 0
my_win = vis.line(X=np.array([x]), Y=np.array([y]), opts=dict(title='Update'))
for i in range(10):
x += 1
y += i
vis.line(X=np.array([x]), Y=np.array([y]), win=my_win, update='append')
使用“append”追加数据,“replace”使用新数据,“remove”用于删除“name”中指定的跟踪。
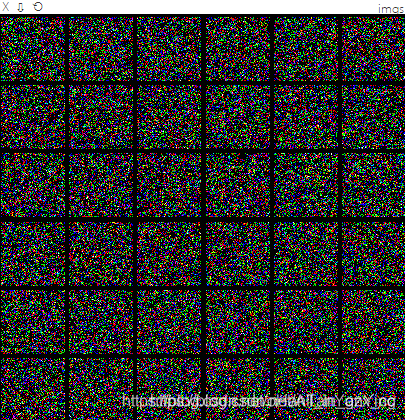
vis.images()
import visdom
import torch
# 新建一个连接客户端
# 指定env = 'test1',默认是'main',注意在浏览器界面做环境的切换
vis = visdom.Visdom(env='test1')
# 绘制正弦函数
x = torch.arange(1, 100, 0.01)
y = torch.sin(x)
vis.line(X=x,Y=y, win='sinx',opts={'title':'y=sin(x)'})
# 绘制36张图片随机的彩色图片
vis.images(torch.randn(36,3,64,64).numpy(),nrow=6, win='imgs',opts={'title':'imgs'})
绘制loss函数的变化趋势
#绘制loss变化趋势,参数一为Y轴的值,参数二为X轴的值,参数三为窗体名称,参数四为表格名称,参数五为更新选项,从第二个点开始可以更新
vis.line(Y=np.array([totalloss.item()]), X=np.array([traintime]),
win=('train_loss'),
opts=dict(title='train_loss'),
update=None if traintime == 0 else 'append'
)
对于Visdom更详细的代码示例详见 链接1
更多介绍详见 链接2
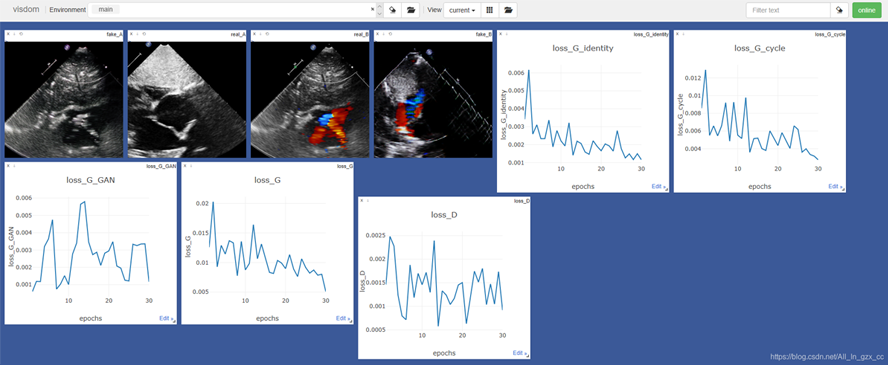
实际代码
此代码出自CycleGAN的 utils.py 里一个实现
# 记录训练日志,显示生成图,画loss曲线 的类
class Logger():
def __init__(self, n_epochs, batches_epoch):
'''
:param n_epochs: 跑多少个epochs
:param batches_epoch: 一个epoch有几个batches
'''
self.viz = Visdom() # 默认env是main函数
self.n_epochs = n_epochs
self.batches_epoch = batches_epoch
self.epoch = 1 # 当前epoch数
self.batch = 1 # 当前batch数
self.prev_time = time.time()
self.mean_period = 0
self.losses = {}
self.loss_windows = {} # 保存loss图的字典集合
self.image_windows = {} # 保存生成图的字典集合
def log(self, losses=None, images=None):
self.mean_period += (time.time() - self.prev_time)
self.prev_time = time.time()
sys.stdout.write('\rEpoch %03d/%03d [%04d/%04d] -- ' % (self.epoch, self.n_epochs, self.batch, self.batches_epoch))
for i, loss_name in enumerate(losses.keys()):
if loss_name not in self.losses:
self.losses[loss_name] = losses[loss_name].data.item() #这里losses[loss_name].data是个tensor(包在值外面的数据结构),要用item方法取值
else:
self.losses[loss_name] = losses[loss_name].data.item()
if (i + 1) == len(losses.keys()):
sys.stdout.write('%s: %.4f -- ' % (loss_name, self.losses[loss_name]/self.batch))
else:
sys.stdout.write('%s: %.4f | ' % (loss_name, self.losses[loss_name]/self.batch))
batches_done = self.batches_epoch * (self.epoch - 1) + self.batch
batches_left = self.batches_epoch * (self.n_epochs - self.epoch) + self.batches_epoch - self.batch
sys.stdout.write('ETA: %s' % (datetime.timedelta(seconds=batches_left*self.mean_period/batches_done)))
# 显示生成图
for image_name, tensor in images.items(): # 字典.items()是以list形式返回键值对
if image_name not in self.image_windows:
self.image_windows[image_name] = self.viz.image(tensor2image(tensor.data), opts={'title':image_name})
else:
self.viz.image(tensor2image(tensor.data), win=self.image_windows[image_name], opts={'title':image_name})
# End of each epoch
if (self.batch % self.batches_epoch) == 0: # 一个epoch结束时
# 绘制loss曲线图
for loss_name, loss in self.losses.items():
if loss_name not in self.loss_windows:
self.loss_windows[loss_name] = self.viz.line(X=np.array([self.epoch]), Y=np.array([loss/self.batch]),
opts={'xlabel':'epochs', 'ylabel':loss_name, 'title':loss_name})
else:
self.viz.line(X=np.array([self.epoch]), Y=np.array([loss/self.batch]), win=self.loss_windows[loss_name], update='append') #update='append'可以使loss图不断更新
# 每个epoch重置一次loss
self.losses[loss_name] = 0.0
# 跑完一个epoch,更新一下下面参数
self.epoch += 1
self.batch = 1
sys.stdout.write('\n')
else:
self.batch += 1
train.py中调用代码是
# 绘画Loss图
logger = Logger(opt.n_epochs, len(dataloader))
for epoch in range(opt.epoch, opt.n_epochs):
for i, batch in enumerate(dataloader):
......
# 记录训练日志
# Progress report (http://localhost:8097) 显示visdom画图的网址
logger.log({'loss_G': loss_G, 'loss_G_identity': (loss_identity_A + loss_identity_B),
'loss_G_GAN': (loss_GAN_A2B + loss_GAN_B2A),
'loss_G_cycle': (loss_cycle_ABA + loss_cycle_BAB), 'loss_D': (loss_D_A + loss_D_B)},
images={'real_A': real_A, 'real_B': real_B, 'fake_A': fake_A, 'fake_B': fake_B})
到此这篇关于python第三方库visdom的使用入门教程的文章就介绍到这了,更多相关python visdom使用内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
您可能感兴趣的文章:- Python数据可视化常用4大绘图库原理详解
- python使用pyecharts库画地图数据可视化的实现
- Python数据可视化处理库PyEcharts柱状图,饼图,线性图,词云图常用实例详解
- Python数据可视化:顶级绘图库plotly详解
- Python数据可视化:箱线图多种库画法
- Python数据可视化库seaborn的使用总结
- 基于telepath库实现Python和JavaScript之间交换数据
- 能让你轻松的实现自然语言处理的5个Python库
- 像线程一样管理进程的Python multiprocessing库
- Python自动安装第三方库的小技巧(pip使用详解)
- Python中threading库实现线程锁与释放锁
- Python文件名的匹配之clob库
- Pytho常见的数据可视化库,小白必备
